Long-horizon Nonlinear Optimal Control
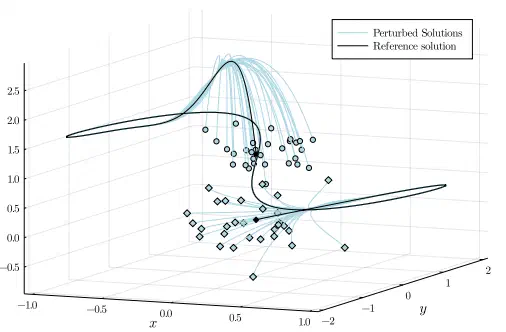
The figure above is taken from Na et al., 2022, which illustrates the robustness of the optimal state-control solution to system perturbations on the two boundaries, referred to as exponential decay of sensitivity in Na and Anitescu, 2020.
We focus on solving time-varying nonlinear optimal control problems (OCPs) given by: $$\begin{align} \min_{\boldsymbol{x}, \boldsymbol{u}}\;\; & \sum_{k=1}^{N-1} g_k(\boldsymbol{x}_k, \boldsymbol{u}_k) + g_N(\boldsymbol{x}_N),\\ \text{s.t.}\;\; & \boldsymbol{x}_{k+1} = f_k(\boldsymbol{x}_k, \boldsymbol{u}_k),\quad k = 0,\ldots,N-1,\\ & \boldsymbol{x}_{0} = \bar{\boldsymbol{x}}_0. \end{align}$$ We are particularly interested in OCPs with a large number of stages $N$, which typically arise in settings with long horizons, fine time discretization resolutions, and multiple timescales. By conducting sensitivity analysis of OCPs, we propose offline distributed methods and online real-time model predictive control (MPC) methods, demonstrating promising global and local convergence guarantees.
For more details, please check out my highlighted works Na and Anitescu, 2020, 2023, Na, 2021, Na et al., 2021, Na et al., 2022, Shin et al., 2022!
Sen Na
Assistant Professor in ISyE
Sen Na is an Assistant Professor in the School of Industrial and Systems Engineering at Georgia Tech. Prior to joining ISyE, he was a postdoctoral researcher in the statistics department and ICSI at UC Berkeley. His research interests broadly lie in the mathematical foundations of data science, with topics including high-dimensional statistics, graphical models, semiparametric models, optimal control, and large-scale and stochastic nonlinear optimization. He is also interested in applying machine learning methods to problems in biology, neuroscience, and engineering.